Главная
Раздел
23. Определение сопротивлений передвижению и определение натяжений в тяговом
органе конвейера
Содержание
1. Определение сопротивлений
передвижению
1.1. Распределенные
сопротивления
2. Определение натяжений в тяговом
органе конвейера (методика тягового расчета)
1. Определение сопротивлений передвижению
Мощность
двигателя машины расходуется на преодоление сопротивления движению элементов
конвейера и перемещению груза. Часть общего сопротивления преодолевается по
всей длине конвейера – такие сопротивления называются распределенными или
сопротивлениями по длине; и часть – в отдельных его пунктах: на барабанах (звездочках),
в местах расположения погрузочных, разгрузочных, очистных и других устройств,
такие сопротивления называются местными.
При расчетах сопротивления пользуются частным коэффициентом
сопротивления перемещению груза, который показывает долю общего сопротивления
движению, приходящуюся на единицу веса груза и движущихся частей конвейера.
1.1. Распределенные
сопротивления
Введем
обозначения:
qг –
погонная нагрузка от массы транспортируемого груза, Н/м,
![]()
где Q – производительность конвейера, т/ч, v – скорость
движения конвейера, м/с; qо – погонная
нагрузка от массы грузонесущего элемента, Н/м; qр
– погонная нагрузка от массы вращающихся частей поддерживающих устройств
(например, роликов), Н/м; W1 –
сопротивление передвижению на один погонный метр, Н/м; q1 = qг + qо – погонная нагрузка подвижных частей конвейера,
Н/м; ![]() –
коэффициент трения скольжения; f – коэффициент трения качения.
–
коэффициент трения скольжения; f – коэффициент трения качения.
Тогда
коэффициент сопротивления
![]()
При длине
прямолинейного участка конвейера L распределенное
сопротивление движению
![]()
В зависимости
от конструкции ходовых частей конвейера рассмотрим четыре случая движения.
1.
Движение подвижных частей конвейера на опорах скольжения (рис. 1).
Рис.
1. Движение подвижных частей конвейера
на опорах скольжения
Сопротивление движению одного погонного метра
движущихся частей
![]()
где ![]() –
коэффициент трения скольжения.
–
коэффициент трения скольжения.
Отсюда
коэффициент сопротивления движению:
![]()
При ![]() =
0 (горизонтальное движение):
=
0 (горизонтальное движение): ![]()
При ![]() =
90о (вертикальный подъем):
=
90о (вертикальный подъем): ![]()
2. Движение
на ходовых роликах (рис. 2).
Рис.
2. Движение на ходовых роликах
Сопротивление
движению в этом случае будет учитывать сопротивление качению ходовых устройств:
![]()
тогда
![]()
где cо – коэффициент сопротивления на ходовых катках,
![]()
где ![]() – коэффициент трения в
цапфах, зависит от типа подшипника и условий работы конвейера, для подшипников
скольжения лежит в пределах 0,1…0,2; для подшипников
качения – 0,010…0,045; f – коэффициент трения качения, см, f = 0,06…0,10 см; во всех случаях
меньшие значения принимаются для хороших условий работы;
– коэффициент трения в
цапфах, зависит от типа подшипника и условий работы конвейера, для подшипников
скольжения лежит в пределах 0,1…0,2; для подшипников
качения – 0,010…0,045; f – коэффициент трения качения, см, f = 0,06…0,10 см; во всех случаях
меньшие значения принимаются для хороших условий работы; ![]() – коэффициент, учитывающий
трение реборд ходовых катков о направляющие. Для цепей с катками без
реборд
– коэффициент, учитывающий
трение реборд ходовых катков о направляющие. Для цепей с катками без
реборд ![]() = 1; с ребордами
= 1; с ребордами ![]() = 1,1…1,2;
d и D – диаметр
цапфы (оси) и наружный диаметр катка соответственно.
= 1,1…1,2;
d и D – диаметр
цапфы (оси) и наружный диаметр катка соответственно.
3. Движение по поддерживающим роликам (рис.
3).
Рис.
3. Движение по поддерживающим роликам
Сопротивление
движению в этом случае складывается из двух составляющих:
– сопротивления
от трения качения между роликом и грузом;
–
сопротивления от трения в цапфе ролика, зависящего от массы роликов и массы
груза.
Давление в цапфе ролика
![]()
тогда сопротивление движению погонного метра длины конвейера
![]()
Коэффициент сопротивления
![]()
где
![]()
4. Движение груза с лентой на
поддерживающих роликах (рис. 4).
Здесь, кроме отмеченных в пункте 3, добавляются сопротивления от
перегиба ленты на роликах и связанное с ним перемешивание (пересыпание) перемещаемого
материала.
Рис.
4. Движение груза с лентой на поддерживающих роликах
Аналитическое
определение сопротивлений в данном случае затруднено, и их учитывают введением
условного коэффициента трения ![]() ,
тогда коэффициент сопротивления
,
тогда коэффициент сопротивления
![]()
где
![]()
1.2. Местные сопротивления
1. Сопротивление на гладком барабане или
блоке.
Сопротивления
на гладких барабанах и блоках складываются из сопротивления трению в
подшипниках оси (вала) и сопротивлений вследствие жесткости тягового элемента –
ленты, цепи или каната при изгибе в точке набегания и
выпрямлении в точке сбегания.
Для
определения величины этих сопротивлений рассмотрим схему (рис. 5), где
обозначено: Sсб
– усилие в сбегающей с барабана ветви тягового элемента; Sнб
– усилие в набегающей на барабан ветви тягового элемента; d – диаметр оси; N – равнодействующая всех усилий
(давление) в цапфе; Fтр – сила трения
качения; D – диаметр
барабана (блока).
Рис. 5. Схема для определения сопротивления
Поскольку на
барабане имеются потери, то Sсб>Sнб,
откуда потери (сопротивление)
Wб= Sсб-Sнб.
(1)
Примем
следующие допущения:
1) так как
натяжения на набегающей и сбегающей ветвях тягового органа отличаются
незначительно, то равнодействующую N от усилий в ветвях и
собственного веса барабана (блока) можно считать проходящей через центр вращения О;
2) масса
барабана (блока) составляет малую долю от натяжений тягового элемента, и ей
можно пренебречь.
Как
показывают опытные данные, эти допущения не вносят существенной ошибки в
расчеты, но зато позволяют весьма просто определить значение силы N.
Сопротивления, Н, определяются двумя составляющими:
![]()
где Pж – потери на
жесткость тягового элемента, Н; Pтр
– потери на трение, Н.
На основании
опытных исследований была получена линейная связь между потерями на преодоление
жесткости и натяжением тяговых органов, т. е.
![]()
где ![]() – коэффициент потерь на жесткость.
– коэффициент потерь на жесткость.
Определим давление в цапфе:
![]()
Сумма моментов относительно оси вращения
![]()
отсюда
![]()
Используя выражения (1) и (2), получим
![]()
Полученная
формула не дает возможности сразу определить Wб,
так как в ней имеются два неизвестных: ![]() и Sсб,
не считая Sнб,
которое должно быть известно.
и Sсб,
не считая Sнб,
которое должно быть известно.
На практике
поступают следующим образом. Так как потери на барабане в сумме не превышают 10%,
принимают, что
![]()
Тогда
![]()
![]()
где Сб
– коэффициент сопротивления движению ленты на барабанах (блоках). Для угла
обхвата 30…90о равен 1,02…1,04; для угла
90…140о равен 1,02…1,05; для угла 140…180о равен
1,03…1,06; везде меньшие значения соответствуют хорошим условиям работы.
Для
многогранного цепного блока или звездочки коэффициент сопротивления Cц принимается равным 1,05…1,08.
2. Сопротивление на криволинейных роликовых
батареях (направляющих шинах) (рис. 6).
Рис.
6. Схема для определения сопротивления
Величина
сопротивления, Н,
![]()
соответственно
![]()
где ![]() ;
c – коэффициент сопротивления движению, зависящий от вида
опорных элементов (роликоопоры или направляющие
шины);
;
c – коэффициент сопротивления движению, зависящий от вида
опорных элементов (роликоопоры или направляющие
шины); ![]() – центральный угол криволинейного участка,
обычно 1,06…1,08 рад.
– центральный угол криволинейного участка,
обычно 1,06…1,08 рад.
3. Сопротивление в месте установки
очистительных устройств.
В случае
использования скребковых и плужковых очистительных
устройств сопротивление, Н,
![]()
где qоч – удельное
сопротивление очистного устройства, отнесенное к единице ширины рабочего
органа, Н/м, qоч = 300…500 Н/м; B – ширина
рабочего органа (лента, настил), м.
В случае
использования барабанных вращающихся щеток
![]()
где qщ – удельное сопротивление щеточного устройства,
отнесенное к единице ширины рабочего органа, Н/м; для сухих грузов qщ = 210…250 Н/м, для влажных и липких грузов qщ
= 300…350 Н/м.
4. Сопротивление в месте загрузки.
Для обеспечения высокого срока службы элементов
конвейера высота падения груза из воронки на грузонесущий орган должна быть минимально
возможной, а скорость и направление подачи груза должны быть близки к скорости
и направлению движения тягового органа (рис. 7).
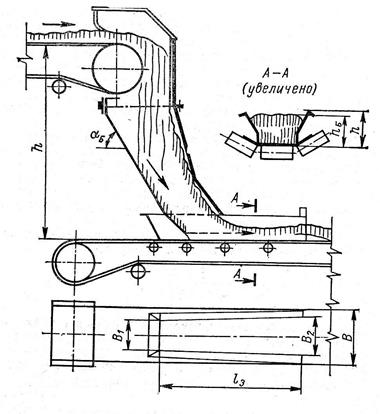
Рис. 7. Схема загрузочного устройства
Углы наклона
стенок воронки ![]() должны быть на 10…15 град больше углов трения
груза о стенки. На боковых стенках лотка устанавливают уплотнительные полосы из
резины.
должны быть на 10…15 град больше углов трения
груза о стенки. На боковых стенках лотка устанавливают уплотнительные полосы из
резины.
Сопротивление
движению грузонесущего органа в месте загрузки, Н,
![]()
где ![]() – сопротивление, Н, при сообщении поступающему
по воронке грузу ускорения грузонесущего элемента,
– сопротивление, Н, при сообщении поступающему
по воронке грузу ускорения грузонесущего элемента,
![]()
где Q –
заданная производительность, т/ч; v– скорость движения грузонесущего
элемента, м/с; ![]() –
сопротивление, Н, от трения груза о неподвижные борта направляющего лотка,
–
сопротивление, Н, от трения груза о неподвижные борта направляющего лотка,
![]()
где ![]() – коэффициент внешнего
трения груза о стенки лотка в состоянии относительного движения,
– коэффициент внешнего
трения груза о стенки лотка в состоянии относительного движения, ![]() ; hб
= 0,3h
– высота груза в лотке высотой h, м;
; hб
= 0,3h
– высота груза в лотке высотой h, м; ![]() – насыпная плотность груза, кг/м3;
– насыпная плотность груза, кг/м3;
![]() – длина лотка, м;
– длина лотка, м; ![]() = 0,6…0,9 – коэффициент бокового давления;
= 0,6…0,9 – коэффициент бокового давления; ![]() – сопротивление, Н, от
трения уплотнительных полос направляющего лотка о грузонесущий элемент конвейера.
– сопротивление, Н, от
трения уплотнительных полос направляющего лотка о грузонесущий элемент конвейера.
![]()
2. Определение натяжений в тяговом
органе конвейера (методика тягового расчета)
Цель тягового
расчета – при известных нагрузках на конвейер и коэффициентах сопротивления
движению определить необходимую мощность для транспортирования и величину
минимального и максимального усилий в тяговом органе по всей длине трассы
конвейера.
Потребная мощность двигателя конвейера, кВт,
![]()
где Wо= Sнб – Sсб
– окружная (тяговая сила), приложена по касательной к окружности приводного
элемента (барабан, звездочка), требуется для преодоления всех сопротивлений
движению, Н; Sнб
и Sсб – натяжения в набегающей и сбегающей ветвях, Н; v – скорость тягового элемента, м/с; ![]() = 0,85 – кпд
передаточного механизма.
= 0,85 – кпд
передаточного механизма.
Для
определения полной тяговой силы конвейера пользуются методом последовательного
обхода трассы по контуру или, что есть то же самое, обхода по точкам сопряжений
прямолинейных и криволинейных участков трассы.
Пронумеровав точки сопряжений (рис. 9, а), начиная от точки сбегания тягового элемента с привода конвейера
к точке набегания, находят последовательно натяжения
во всех точках, и по разности натяжений на набегающей и сбегающей ветвях
определяют тяговую силу.
Во всех
случаях удобно начинать обход трассы от точки сбегания тягового элемента с
привода.
При
определении натяжения во всех точках контура пользуются общим правилом.
Натяжение тягового элемента в каждой последующей по ходу точке трассы равно сумме натяжения в предыдущей точке и сопротивления на участке между этими точками, т. е.
![]()
Рис. 9. К определению натяжений в ленте: а – cхема трассы конвейера с гибким тяговым органом;
б
– график изменения натяжения в ленте – тяговая диаграмма конвейера
Тяговые
расчеты обычно сопровождаются построением диаграммы натяжений (рис. 9, б), в которой графически изображаются
полученные натяжения и законы их изменения.
Так как длина прямолинейных участков много больше
размеров направляющих и поддерживающих устройств (блоки, звездочки, шины), то
размеры последних в расчет не вводятся, и их считают сосредоточенными.
Диаграмма
строится от точки 1 сбегания тягового
элемента с привода, расположенного в головной части конвейера, в которой
возникает усилие S1.
Сопротивление
движению на прямолинейных участках
W = ωqоL,
где ![]() – общий коэффициент
сопротивления движению, учитывающий и работу подъема, и работу по преодолению
сил трения,
– общий коэффициент
сопротивления движению, учитывающий и работу подъема, и работу по преодолению
сил трения,
![]()
где cо – коэффициент сопротивления движению на ходовых
(поддерживающих) устройствах; qо – погонная
нагрузка от веса подвижных частей конвейера, за исключением груза, Н/м; L – длина участка, м.
Кроме этого,
в расчете участвуют Cб – коэффициент, учитывающий
потери мощности (сопротивление движению тягового органа) при прохождении поворотных
участков – отклоняющих, оборотных и концевых барабанов, блоков, звездочек; qг – погонная нагрузка от веса груза, Н/м.
Определяем
усилия, Н:
S1 – усилие пока не известно;
S2 = S1 + W1–2 = S1 + ![]() qoL’’ = S1 + cо qoL’’;
qoL’’ = S1 + cо qoL’’;
S3 = Cб∙S2;
S4 = S3 + W3–4 = S3 + ![]() qo∙L’ = S3 + qo(– sin
qo∙L’ = S3 + qo(– sin![]() + cоcos
+ cоcos![]() )∙ L’
;
)∙ L’
;
S5 = Cб × S4;
S6 = S5 + W5–6 = S5 + ![]() (qo
+ qг)L’ = S5 + (qo + qг)∙(sin
(qo
+ qг)L’ = S5 + (qo + qг)∙(sin![]() + cоcos
+ cоcos![]() )∙ L’;
)∙ L’;
S7 = Cб ∙S6;
S8 = S7 + W7–8 = S7 + ![]() (qo
+ qг)L’’ = S7 + (qo + qг)∙(sin
(qo
+ qг)L’’ = S7 + (qo + qг)∙(sin![]() + cоcos
+ cоcos![]() )∙L’’.
)∙L’’.
Следует отметить, что определение натяжений должно производиться с учетом
направления движения тягового органа на наклонных участках. Так, если
направление движения совпадает с направлением уклона, т. е. тяговый орган
движется вниз, то и сопротивление в данном случае необходимо учитывать со
знаком «минус». В этом случае составляющая силы тяжести «помогает» приводу. А
на горизонтальных участках в силу того, что потерь мощности на подъем не
происходит, учитываются только потери на трение при движении.
В данном случае не рассмотрены сопротивления, которые могут возникать,
например, в месте установки загрузочных, очистных, разгрузочных и других устройств.
При расчете конкретной машины эти сопротивления должны быть учтены на соответствующих
участках трассы конвейера.
В дальнейшем, если выразить все натяжения через первоначальное S1, можно отметить, что усилия на приводном элементе сведутся к соотношению следующего вида:
S8 = aS1 + b, (3)
где а и b –
численные коэффициенты после подстановки значений коэффициентов сопротивлений,
погонных нагрузок и длин участков.
Далее производится определение всех натяжений в тяговом органе в
соответствии с конструкцией конвейера:
– если привод с передачей усилия зацеплением, первоначальное натяжение
принимается равным определенной величине;
– если привод фрикционный, с передачей тягового усилия трением, необходимо
составить систему уравнений из выражения (3) и условия отсутствия проскальзывания
ленты по барабану (уравнение Эйлера), откуда определяется усилие S1.
Далее строится тяговая диаграмма, определяется тяговое (окружное) усилие
на приводном элементе и рассчитывается требуемая мощность привода.
Вопросы для самопроверки
- Запишите в общем виде уравнение движения конвейера.
- Каким методом производится уточненный расчет конвейеров с гибким тяговым
органом?
- Что такое приведенная к окружности масса приводного барабана?
- Как протекают и чем характеризуются динамические переходные процессы в тяговых органах ленточных и цепных конвейеерах?
- Определите массовую и объемную производительность контейнера.
- Как определить распределенные силы соспротивления движению тягового органа конвейера? Сосредоточенные? Дополнительные?
- Определите натяжения тягового органа конвейера по точкам.
- Представьте алгоритм построения и покажите общий вид диаграммы натяжения тягового органа конвейера.
- Как записывается формула Эйлера для конвейеров при двигательном и тормозном режимах работы привода?
- Сформулируйте правило определения натяжений в тяговом органе конвейера.
- Что такое дуга скольжения и дуга покоя барабана конвейера при передаче тягового усилия трением?
- Как определяется тяговая сила конвейера?
- Почему при передаче тягового усилия зацеплением тяговый орган конвейера движется неравномерно?
- Как определить мощность двигателя конвейера при работе привода в двигательном и тормозном режимах?
- Как определяется требуемая мощность привода?
- Когда двигатель привода работает в двигательном и тормозном режимах?
- Опишите последовательность построения тяговой диаграммы.
email: KarimovI@rambler.ru
Адрес: Россия, 450071, г.Уфа, почтовый ящик 21
Теоретическая механика Сопротивление материалов
Прикладная механика Строительная механика Теория машин и механизмов